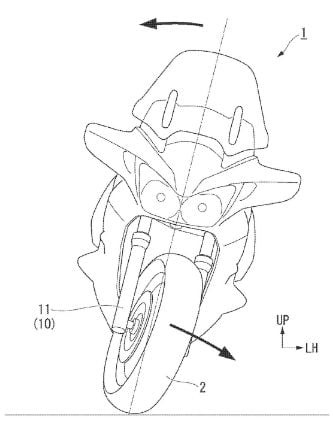
Dokumen selanjutnya menjelaskan bahwa dalam keadaan di mana tidak ada penumpang yang mengendarai sepeda motor segera setelah kecelakaan terjadi, ada kebutuhan untuk mencegah terjadinya kerusakan tambahan dengan mengendalikan perilaku kendaraan yang berjalan sendiri.
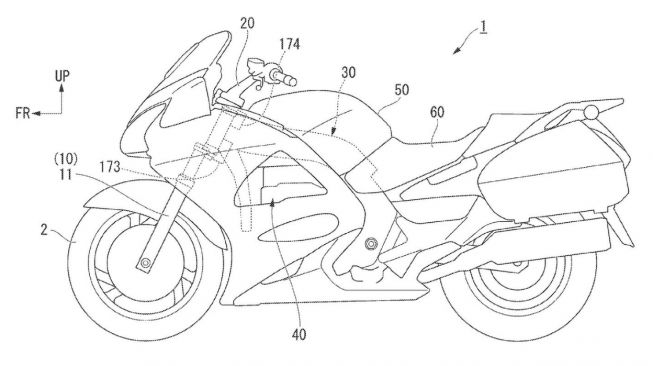
Teknologi ini bekerja dengan motor yang mendapat tambahan termasuk sensor gyro, kamera, radar, dan unit lidar (Light Detection and Ranging) yang menggunakan laser untuk memetakan kondisi di sekelilingnya.
Sensor ini terhubung ke komputer yang juga memantau apakah akan ada tabrakan atau tidak, dan apakah ada pengendara di kursi motor. Dalam keadaan yang sangat spesifik, ketika tidak ada pengendara tetapi sepeda masih bergerak, komputer mengambil kendali. Bagaimana, canggih kan?





























